Morphing NASA robot could someday walk, fly and drive over alien planets (video)

How do you design a robot that can explore a wide variety of terrain it might encounter on alien planets?
A team from Caltech and NASA's Jet Propulsion Laboratory (JPL) has designed a robot that goes way beyond your typical rover and may be the next step in planetary exploration. The four-wheeled Multi-Modal Mobility Morphobot (M4) is designed to autonomously asses its surrounding terrain to determine how to best traverse upcoming obstacles.
The M4's unique capabilities combine solutions from hurdles experienced in previous robotic missions on Mars and could provide the innovation needed to anticipate future ones. Rough terrain ahead? No problem. The M4's four wheels are designed to pivot onto their sides and work as propellers, turning the Morphobot into a quadcopter drone. Obstacle in your way? M4 can stand up using its back two wheels like legs, balancing itself with the rotary thrust of its front propellers as it pivot-walks to a clear path. And using artificial intelligence (AI), M4 is designed to make these determinations autonomously.
Related: Curiosity rover on Mars gets a brain boost to think (and move) faster

Robotic planetary exploration vehicles, like the wheeled rovers on Mars, are limited to the landscapes they are able to navigate. NASA's Curiosity rover, for example, has been exploring the Martian surface for eleven years. In that time, the robotic explorer has driven less than twenty miles (32 kilometers) and experienced damage to its wheels within the first several months of its mission.
NASA's more recent Mars rover, Perseverance, was sent with a small helicopter companion called Ingenuity. The success of Ingenuity's flights on the Red Planet prompted NASA to keep the drone-like vehicle operational long past its planned mission in order to help scout routes for Perseverance, providing mission operators valuable insight into the rover's road ahead.
M4 could handle all of these tasks on its own thanks to a revolutionary set of capabilities.
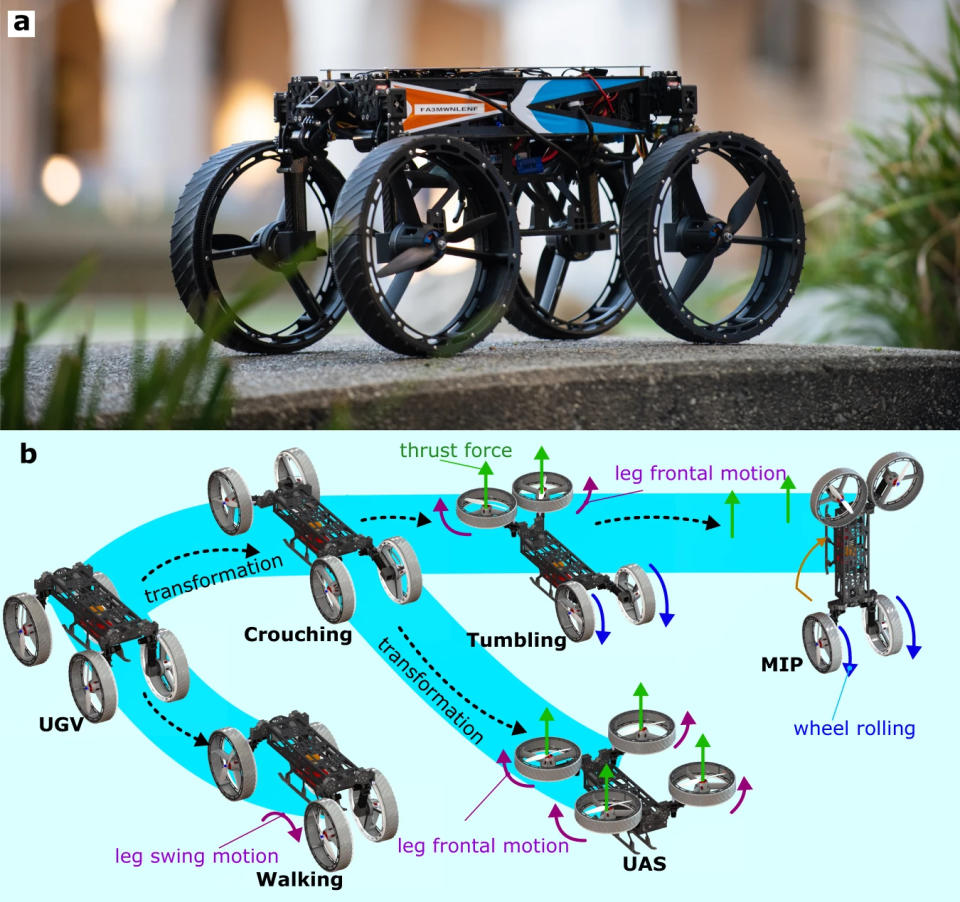
"Our aim was to push the boundaries of robot locomotion by designing a system that showcases extraordinary mobility capabilities with a wide range of distinct locomotion modes. The M4 project successfully achieved these objectives," assistant professor of electrical and computer engineering at Northeastern University Alireza Ramezani said in a Caltech statement.
Ramezani and Caltech director of Bioinspired Engineering and aeronautics professor Mory Gharib came up the idea for M4, which they developed together with a group at Caltech's Center for Autonomous Systems and Technologies (CAST). Their team consisted of Caltech's Eric Sihite, an aerospace postdoctoral scholar research associate, CAST design engineer Reza Nemovi and Arash Kalantari, from JPL.
The group published a paper last month in the journal Nature Communications announcing the robot. The paper cites the locomotive techniques of different animals as the inspiration behind some of M4's design, such as the Chukar bird, which flap its wings for balance while walking over hilly landscapes.
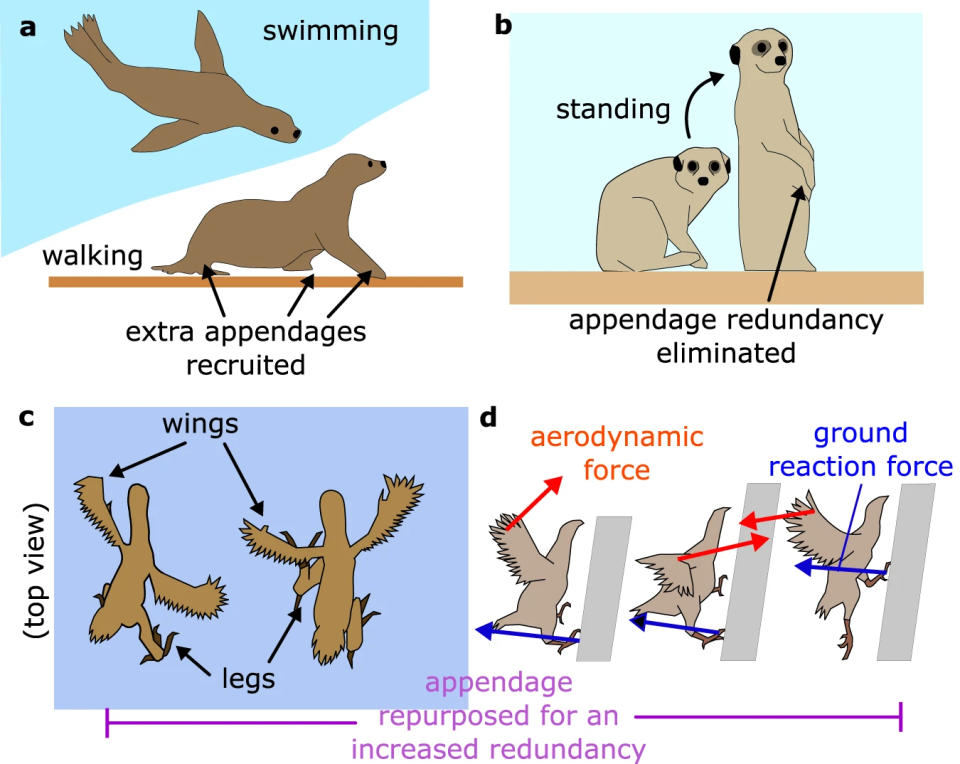
"Chukar birds adopt a similar wing repurposing to increase redundancy to support legged locomotion over steep terrain through a phenomenon known as wing-assisted incline running (WAIR)," the paper states. It also draws comparisons to sea lions' differing appendage usage depending on whether they animal is swimming or walking on land.
Related Stories:
— Mars donut! Perseverance rover spots holey Red Planet rock (photo)
— Japan's Astroscale has a new robot tug to clean up space junk. Here's how it works (video)
— This snake robot could hunt alien life on icy moons like Saturn's Enceladus
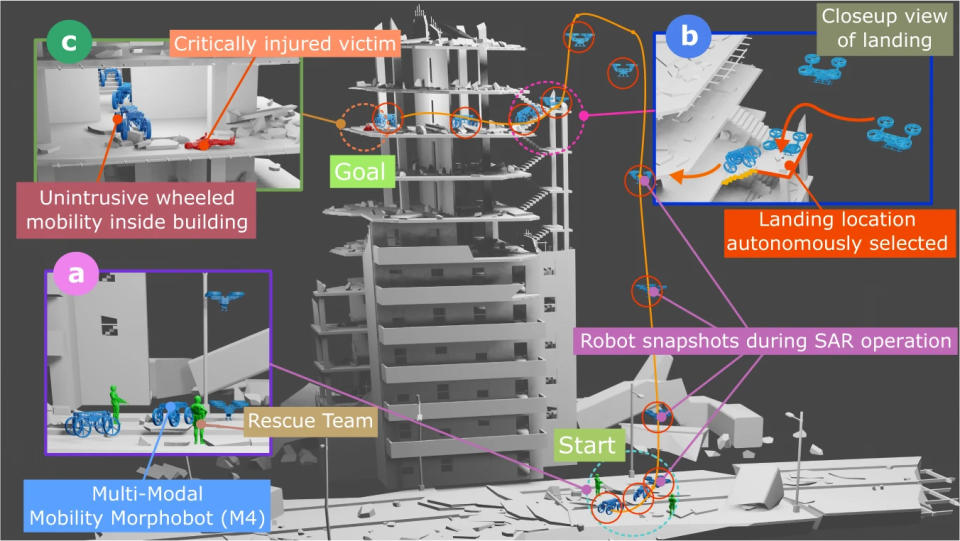
The M4 team at CAST also see uses for the Morphobot's technology here on Earth, particularly in the field of emergency services. One example in the paper describes the aftermath of a natural disaster, in which M4 is able to fly inside a collapsed building, then drive and "walk" around confining obstacles until it locates survivors and alerts first responders.

